¿Podemos simular el cerebro humano?

Escribir El Quijote o viajar a la Luna ha sido posible gracias al cerebro humano, un prodigio de la evolución que la ciencia aspira a comprender y replicar.
Cognición, acción y emoción surgen del intercambio de impulsos eléctricos entre neuronas. Todo lo que conocemos del mundo, cómo lo percibimos e interactuamos con él depende del cerebro. Pero nuestro conocimiento del cerebro es aún limitado y conseguir replicarlo pasa por conocerlo íntimamente. Desvelar sus secretos constituye uno de los grandes desafíos científicos de este siglo.
Prueba de la magnitud del reto es la existencia de iniciativas gubernamentales de gran envergadura como la europea Human Brain Project (HBP) o la estadounidense BRAIN Initiative. Ambos proyectos cuentan con numerosos equipos de investigación dedicados a desentrañar la estructura y funcionalidad del cerebro desde los niveles molecular o celular hasta grandes centros nerviosos involucrados en tareas concretas.
Como ya demostró el Proyecto Genoma Humano, la colaboración es indispensable para acometer un desafío de tal dimensión. En el caso del HBP, investigadores de más de 140 instituciones científicas de todo el mundo colaboran desde el año 2013 para traducir el conocimiento del cerebro humano en mejoras sanitarias y desarrollo tecnológico, contando a su vez con un área dedicada a estudiar las implicaciones sociales y éticas de los avances realizados.
Si conseguimos entender cómo funciona el cerebro podremos diagnosticar y tratar con mayor eficacia enfermedades neurológicas que se nos resisten, como el alzhéimer o el párkinson.
A su vez, el conocimiento de los procesos cognitivos cerebrales sirve de inspiración para nuevas tecnologías en campos como la inteligencia artificial o la robótica.
Simular el cerebro: divide y vencerás
Imitar el modo en que funciona el cerebro permite diseñar algoritmos que descubren cómo resolver problemas, o desarrollar modelos computacionales de centros nerviosos que asisten a robots en tareas altamente sofisticadas, como aprender y adaptarse a situaciones imprevistas.
Estos modelos computacionales, siempre que respeten las características biológicas del área nerviosa que simulan, también sirven como herramientas para la neurociencia. Suponen organoides virtuales que permiten a los neurocientíficos estudiar patologías y ensayar posibles tratamientos, de difícil estudio en humanos por cuestiones éticas.
Ante la complejidad del cerebro, la ciencia ha optado por dividir su estudio en el de partes más pequeñas: grupos de neuronas que se agrupan siguiendo una estructura similar o áreas nerviosas vinculadas con una función determinada (cerebelo, hipocampo, ganglios basales…). Estamos en el camino de simular partes del todo. Quizá cuando tengamos todas las piezas del puzle podamos juntarlas y, usando el propio cerebro, comprenderlo.
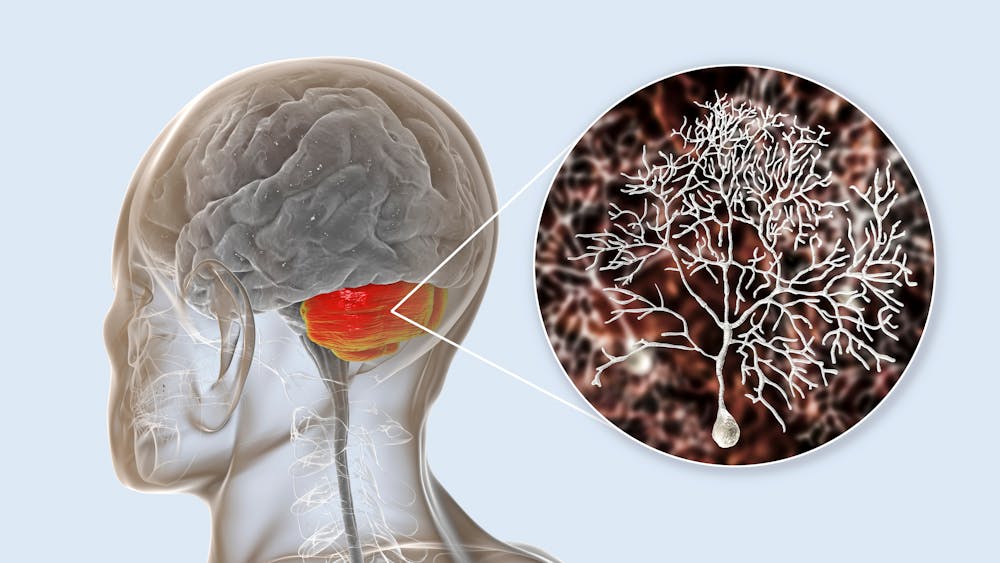
Ilustración que resalta el cerebelo y las neuronas Purkinje. Shutterstock / Kateryna Kon
El cerebelo, el cerebro pequeño
Las alrededor de 86 000 millones de neuronas que tiene el cerebro humano se distribuyen en una estructura muy heterogénea, compleja y aparentemente caótica. Sin embargo, un área destaca justamente por lo contrario, una estructura sencilla y regular. Me refiero al cerebelo (del latín cerebellum, “cerebro pequeño”), ubicado en la parte posterior del cráneo y que concentra más de la mitad de las neuronas del sistema nervioso.
Este área nerviosa integra vías sensitivas y motoras. El cerebelo recibe información procedente de los sentidos, la procesa, y activa una respuesta motora. Juega un papel fundamental en la ejecución de movimientos precisos, la coordinación o el equilibrio.
En el cerebelo se organizan distintos tipos de neuronas que siguen una estructura de capas interconectadas mediante sinapsis. Algunas de estas capas están dotadas de plasticidad, lo que permite el aprendizaje.
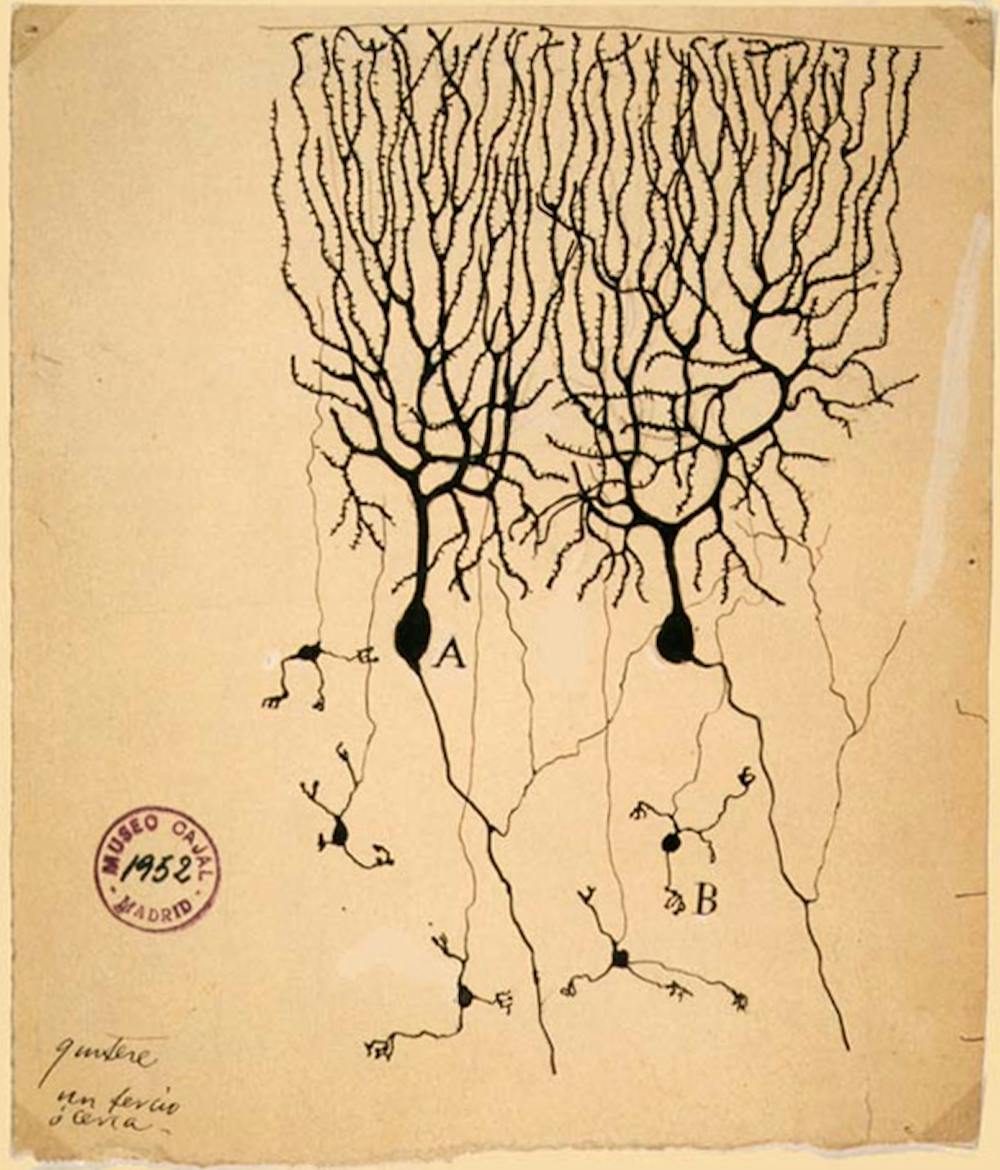
Dibujo de Santiago Ramón y Cajal de células de Purkinje. Wikimedia Commons / Santiago Ramón y Cajal
Ya a principios del s. XX, Santiago Ramón y Cajal detalló con gran maestría uno de los tipos de neurona del cerebelo, las células de Purkinje. Posteriormente se ha podido definir el resto de la estructura cerebelosa y estudiar su implicación directa en el aprendizaje motor.
Por ejemplo, si jugamos al tenis y lanzamos la pelota fuera de la pista, el cerebelo aprende a corregir esa desviación entre lo que queríamos realizar y lo que hemos realizado. Es capaz de, mediante ensayo y error, ajustar las acciones motoras para que sus consecuencias se correspondan con nuestras expectativas.
Neuro-robótica, inspiración biológica
La robótica tradicional utiliza robots y controladores capaces de ejecutar tareas motoras específicas con alta precisión. Pero si la tarea o el robot cambian se necesita un nuevo controlador. Para desarrollar robots más versátiles, capaces de realizar tareas más complejas, tal y como aprende el tenista del ejemplo anterior, la robótica se inspira en la biología.
Así, en el grupo de investigación Neurociencia Computacional Aplicada (departamento de Arquitectura y Tecnología de Computadores, Universidad de Granada), hemos desarrollado un cerebelo artificial que imita al humano. El estudio, publicado en la revista Science Robotics, aplica el cerebelo simulado para controlar el movimiento de un robot. La estructura homogénea del cerebelo y su papel reconocido en el aprendizaje motor lo convierten en el candidato ideal para poder simularlo y aplicarlo a la robótica.
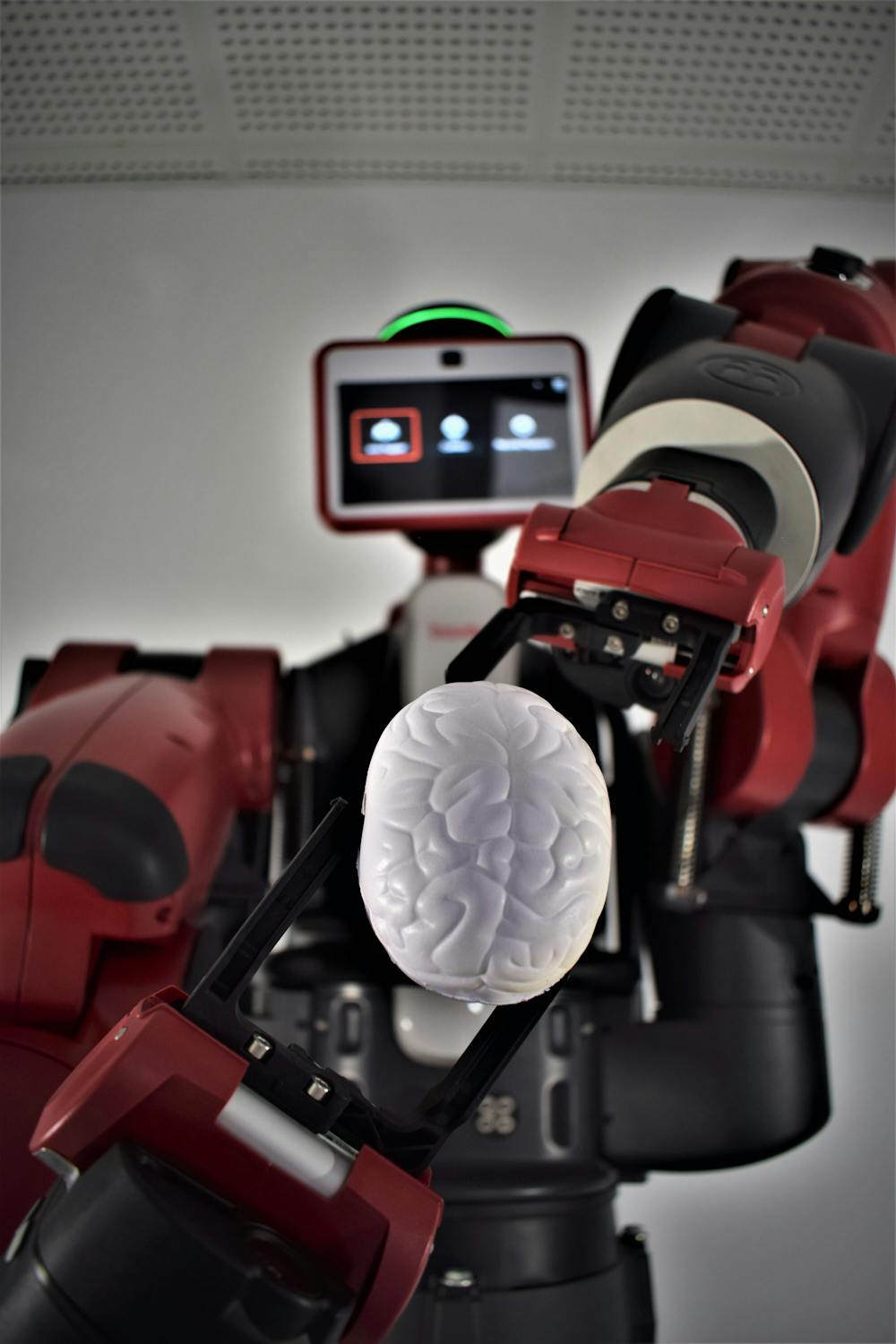
Robot utilizado por el grupo de investigación Neurociencia Computacional Aplicada de la Universidad de Granada. Remitida por el autor
Utilizando ese modelo simulado de cerebelo humano, que replica las principales características de su homólogo biológico, hemos conseguido que un robot, un brazo robótico, aprenda desde cero qué órdenes debe mandar a sus motores para realizar distintas tareas.
Así como un niño aprende a montar en bicicleta, descubriendo qué órdenes debe mandar a los músculos de sus piernas para mover los pedales y al resto del cuerpo para mantener el equilibrio, el modelo simulado de cerebelo aprende los comandos que debe enviar a los motores del robot para que el brazo ejecute la trayectoria deseada.
Con este controlador, el robot es capaz de adaptarse a cambios dinámicos, como un peso añadido o una fuerza elástica externa. Es decir, aprende y cambia sus comandos en función de lo que esté ocurriendo en el mundo exterior.
Otra característica innata del cerebelo biológico es su capacidad de predecir acciones futuras utilizando información sensorial pasada. Fisiológicamente, es inevitable que la información sensorial tarde unos milisegundos en llegar al cerebelo, igual que la correspondiente respuesta motora no llega a los músculos de manera inmediata. Tardamos unos milisegundos en responder, por ejemplo, a la pelota que está a punto de darnos en la cabeza.
Para movernos con precisión, el cerebelo compensa estos retardos temporales presentes en el ciclo de percepción-acción mediante un comportamiento predictivo: se adelanta a lo que va a suceder y nos apartamos a tiempo del balonazo.
Esta característica propia del cerebelo biológico nos permite aplicar nuestro modelo simulado en escenarios de control robótico afectados por retardos temporales. En nuestro trabajo, controlamos el robot utilizando una conexión WiFi y también por control remoto, estableciendo una conexión de unos 400 kilómetros entre el controlador (ubicado en Madrid) y el robot (ubicado en Granada).
En los escenarios de control clásico, en los que el robot y controlador se conectan directamente por cable, los retardos temporales son insignificantes. Pero en escenarios cada vez más comunes como el control inalámbrico, remoto, o en la nube, los retardos temporales son inevitables por lo que se necesitan nuevos tipos de controladores robustos ante ese desfase percepción-acción. De nuevo, el controlador que simula el cerebelo humano ofrece una solución a este problema.
Avances técnicos que aún no imaginamos
Aún desconocemos cómo se forman la memoria o la creatividad. Estamos lejos de entender el cerebro humano como un todo, y simularlo por completo aún no está en nuestras manos. Pienso que llegaremos a Marte antes que a un conocimiento completo del cerebro. Comprenderlo pasa por estudiar tanto el nivel celular como el más abstracto nivel funcional. Para ello será fundamental continuar con el desarrollo de tecnologías que ofrezcan perspectivas antes imposibles, avances técnicos que probablemente no seamos capaces ni de imaginar a día de hoy.
Quién habría imaginado que unas algas sensibles a la luz serían la clave para revolucionar la neurociencia. Esas algas esconden la base de la optogenética, una técnica que permite inducir actividad eléctrica en neuronas específicamente seleccionadas para poder estudiar su impacto en la función cerebral y el comportamiento.
La investigación y el desarrollo de nuevas tecnologías exigen tiempo; la evolución ha tenido todo el tiempo del mundo. A la hora de dar respuesta a problemas tecnológicos, investiguemos cómo la evolución ha logrado solventar obstáculos similares hasta alcanzar estables, y variadas, formas de vida.
Quizá la propia biología esconda las respuestas para desarrollar las herramientas que nos permitirán descifrar su mayor logro, el cerebro humano.
![]()
Este artículo fue publicado originalmente en The Conversation. Lea el original.



















{kind=link}